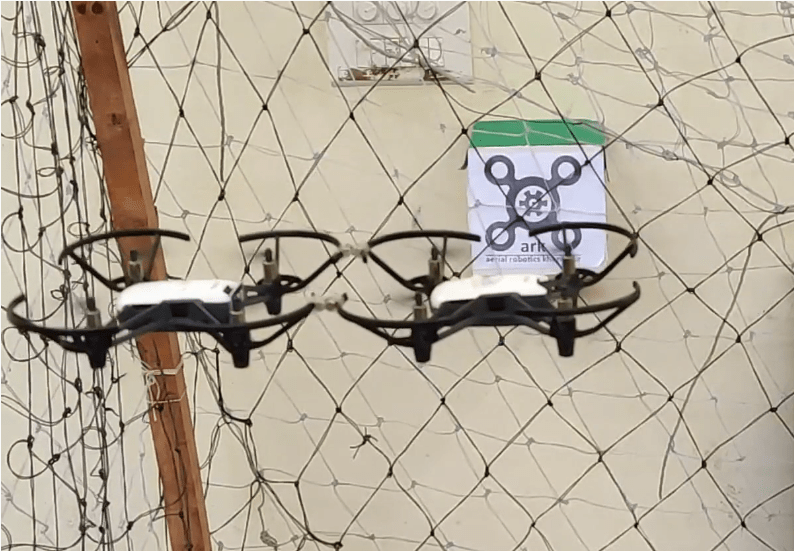
Инженер из Индии придумал, как объединять летающих роботов. Для этого он взял двух серийных дронов DJI Tello и прикрепил на корпус магниты. Затем разделил их на роли — пассивную и активную. На пассивного наклеил матричный код, чтобы активный дрон с помощью камеры мог отследить положение метки. Обнаружив ее, актив ищет подходящую траекторию для стыковки и крепится за магнит напарника.
Объединившись, беспилотники становятся сильнее — могут перевозить тяжести побольше и выполнять синхронные пируэты.