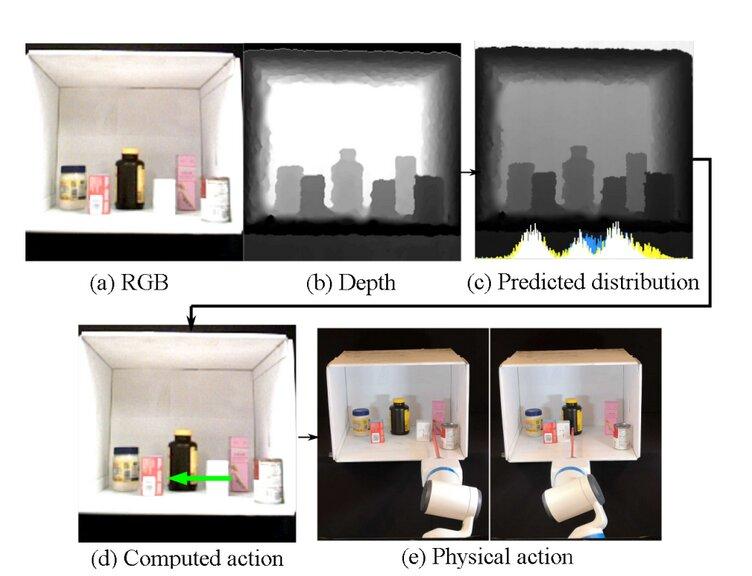

😌 Что: переставлять предметы с места на место роботы умеют давно. А вот делать это в ограниченных условиях не умеют.
☺️ Как работает: модель определяет положение объектов относительно друг от друга, объединяя информацию восприятия рабочего пространства. Благодаря этому робот может обнаружить и задействовать все возможные варианты перестановки, чтобы не зацепить соседние вещи.
😯 Зачем: таких роботов будут использовать для работы в складских или производственных помещениях особой важности, где требуется высокая точность. Например, чтобы склянки в аптеке переставлять.
👥 Кто: учёные из Калифорнийского университета.
👉 Посмотреть:
👉 Почитать: arxiv.org
Источник: techxplore.com











![[Глядите] что внутри зашифрованного внешнего жёсткого диска](https://thecode.media/wp-content/uploads/2020/07/img-5392.jpg)