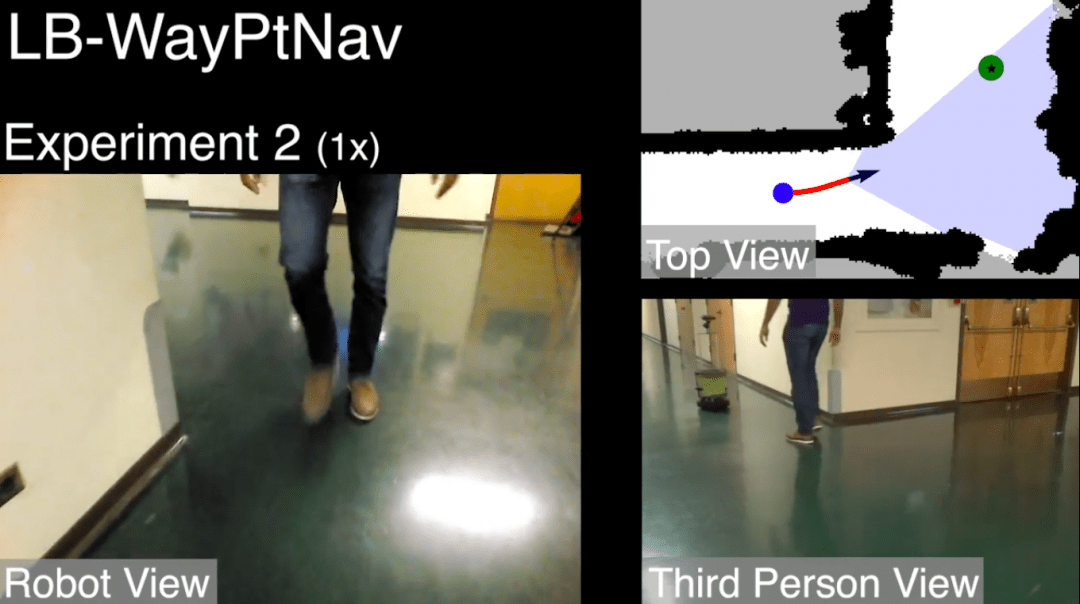
😢 Проблема: роботам сложно ориентироваться среди движущихся объектов, они в них врезаются и путаются.
😎 Решение: фреймворк B-WayPtNav-DH, который учит перемещаться среди людей в помещениях. Он состоит из трёх модулей: восприятия, планирования и управления. Модуль восприятия сделан на нейронке, которая с помощью управляемого обучения строит роботу маршрут от начальной точки. Потом эту точку передают в модули управления и планирования, помогая роботу избегать любых препятствий и окружающих людей.
👨🔬 Кто: учёные Калифорнийского университета в Беркли
Источник: Nature