В чём проблема: человеку легко держать баланс, потому что мы этому обучались несколько лет на практике. Также мы чувствуем землю ногами и видим горизонт глазами. Не говоря о вестибулярном аппарате, который постоянно подсказывает нам, какое положение мы занимаем в пространстве.
У роботов изначально ничего этого нет. Если ты хочешь, чтобы твой робот ощущал контакт с землёй, тебе нужно встроить датчики касания в конечности. Если нужен вестибулярный аппарат, устанавливай в робота гироскоп и акселерометр. И потом программируй всё так, чтобы данные с этих датчиков правильно обрабатывались и влияли на моторы.
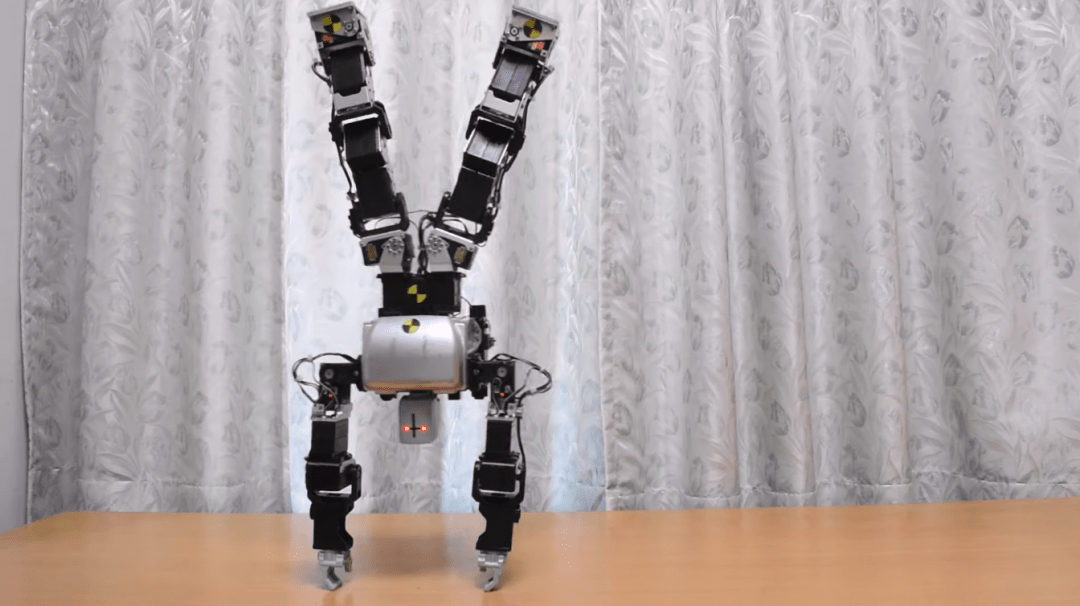
И что: эту задачу со всей силы решают инженеры всего мира и один японский роботовод-энтузиаст с ником Dr. Guero.