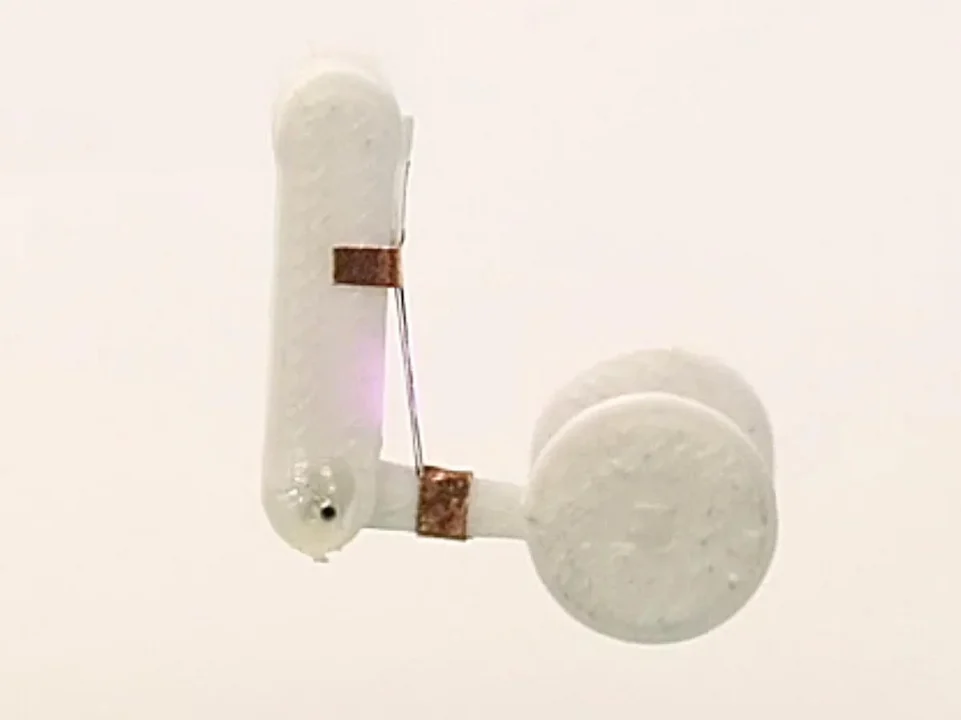
Что случилось: прыгающий робот по кличке Сальто наконец-то научился приземляться туда, куда его запрограммировали, а не куда получится.
В последнем обновлении Сальто научили лучше контролировать своё положение в пространстве. За мягкую посадку отвечают вращающийся инерционный хвост и пара подруливающих винтов для многоосевой устойчивости. Роботу удалось снизить стандартное отклонение от цели приземления с 9 до 1,6 см, так что теперь он может справляться с маленькими целями — например, ветвями деревьев.
Ждём видео робота, скачущего по ботаническому саду в Беркли.
Кто научил: учёные Калифорнийского университета в Беркли.
Источник: Spectrum





![[Вот, почитайте] Как в Ютe работает ИИ, который собирает инфу из всех государственных источников и соцсетей](https://thecode.media/wp-content/uploads/2020/04/Снимок-экрана-2020-04-09-в-9.56.15.png)