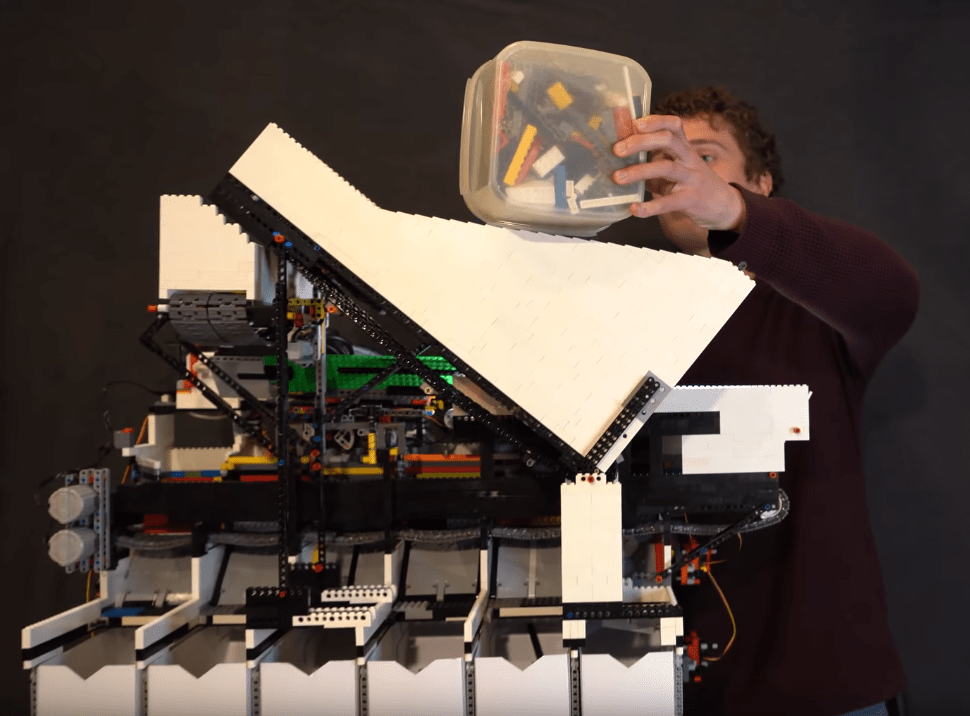
Изобретатель Дэниел Вест устал от сортировки LEGO и собрал робота из того же конструктора, который делает всю грязную работу за него. Понадобилось около десяти тысяч деталей, Raspberry Pi и обученная нейросеть. И два года на разработку — парень сам собирал датасет, в который вошли практически все детали LEGO.
Как работает — LEGO попадает на конвейер, где робот записывает детали на видео. Затем изображения обрабатываются в Raspberry Pi и отправляются на еще один компьютер по беспроводной связи. Там нейросеть определяет, в какую коробочку отправить детальку, и отдает результаты роботу. Наконец, машина скидывает деталь в нужный контейнер. На все про все — 2 секунды.
Однажды один любитель конструктора посмотрел это видео до конца и больше никогда не наступал на LEGO.