😢 Проблема: классические роботизированные захваты с параллельными зажимами слишком жёсткие и недостаточно ловкие. А роборуки с громоздкими пальцами управляются сложными приводами и стоят дорого. Это ограничивает широкое применение захватов-манипуляторов.
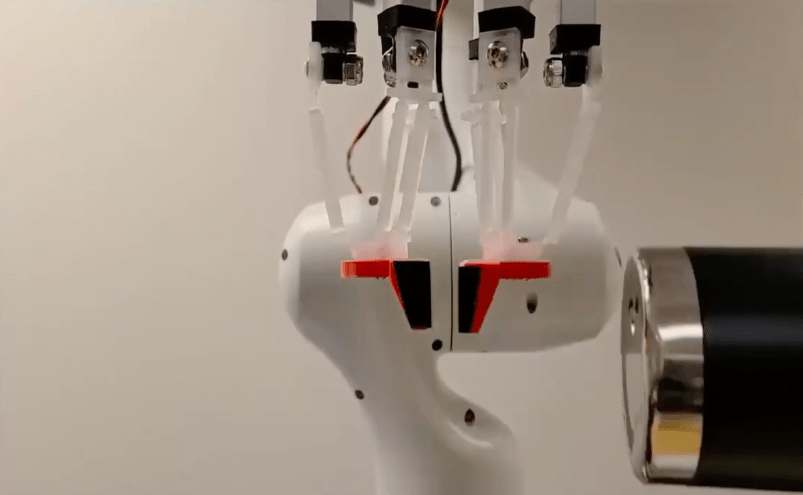
😎 Решение: недорогой захват из двух дельта-роботов размером с сантиметр, напечатанных на 3D-принтере. Они состоят из трёх рычагов, прикреплённых шарнирами к основанию, и управляются стандартными линейными приводами. Захват обеспечивает высокую гибкость и может справляться с деликатными рабочими задачами.
Чтобы два дельта-робота смогли работать вместе как захват, обучили нейронные сети, используя систему восприятия.
😊 Зачем: такое решение можно использовать для создания модульных многопалых роборук, которые могут выполнять точные и малоинерционные манипуляции.
👉 Посмотреть на это:
👥 Кто: исследователи Университета Карнеги — Меллона, США.
Источник: ri.cmu.edu





![[Почитайте]: что такое GPT-3](https://thecode.media/wp-content/uploads/2020/09/zdnet-gpt-3-is-the-next-word-in-ai-ver-2-1080x680.jpg)
![[Почитайте]: Как сделать Pi-Hole — штуку, которая глушит всю рекламу и ускоряет интернет](https://thecode.media/wp-content/uploads/2020/07/0_TCrEJluo7rbs8Gh0-1080x608.jpeg)
![[Почитайте], как изобрели QR-код](https://thecode.media/wp-content/uploads/2020/11/MzcxODQ3MA-1080x650.jpeg)