🎈Проблема: в мягких роботах удобно использовать надувные приводы — для управления ими достаточно применять давление. Но при этом такие приводы всегда деформируются одинаково, и это ограничивает их применение.
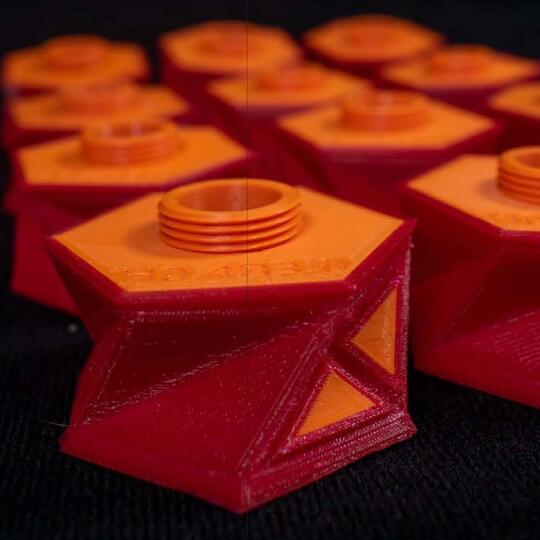
😎 Решение: приводы с конструкцией оригами, благодаря которой они могут менять форму по-разному.
🤔 Как работает: сначала под давлением надуваются нужные секции оригами, после чего под воздействием вакуума привод изгибается, сжимается или скручивается. При необходимости надувают дополнительные секции оригами.
При тестировании доказали, что привод с 12 различными модулями может выполнять до 8 разных движений.
🤨 И что? Такие приводы двигаются и меняют форму без электроники и проводов, их можно настраивать на разные движения, при этом достаточно всего одного источника давления.
👉 Посмотреть:
👥 Кто: исследователи Гарвардского университета, США, Королевского колледжа Лондона, Великобритания, Лёвенского католического университета, Бельгия.
Источники: seas.harvard.edu и onlinelibrary.wiley.com