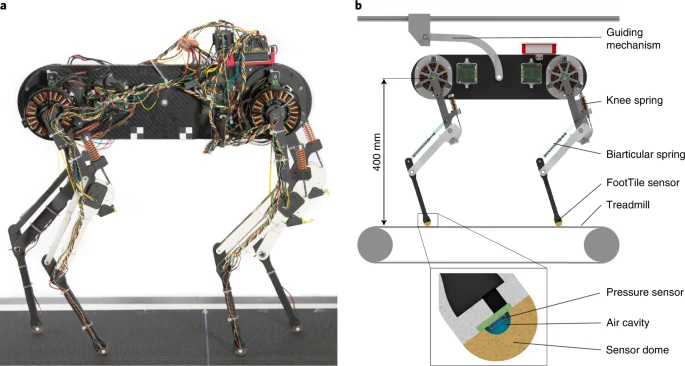

😱 Что случилось: сделали робота-собаку Морти, который ходит, научившись этому, а не выполняя запрограммированные действия.
🤔 А как? Алгоритм генерировал инструкции по ходьбе, не имея данных о конструкции ног робота, например о точной форме каждого компонента. Датчики фиксировали положение ног и передавали информацию, если робот падал или терял контакт с землёй. Если Морти спотыкался, алгоритм менял скорость и длину шагов.
Система училась на ошибках, примерно как новорождённый жеребёнок корректирует движения, пока не перестанет оступаться и падать. Спустя час Морти научился ходить.
Поскольку система училась, а не просчитывала движения заранее, ей понадобилось мало энергии. К концу обучения Морти расходовал на 42% меньше энергии, чем в начале — 5 ватт в час. Другие роботы похожего размера потребляют от нескольких десятков до нескольких сотен ватт.
👉 Посмотреть:

👥 Кто: исследователи Института интеллектуальных систем Макса Планка, Германия.
Источник: cdotrends.com и nature.com