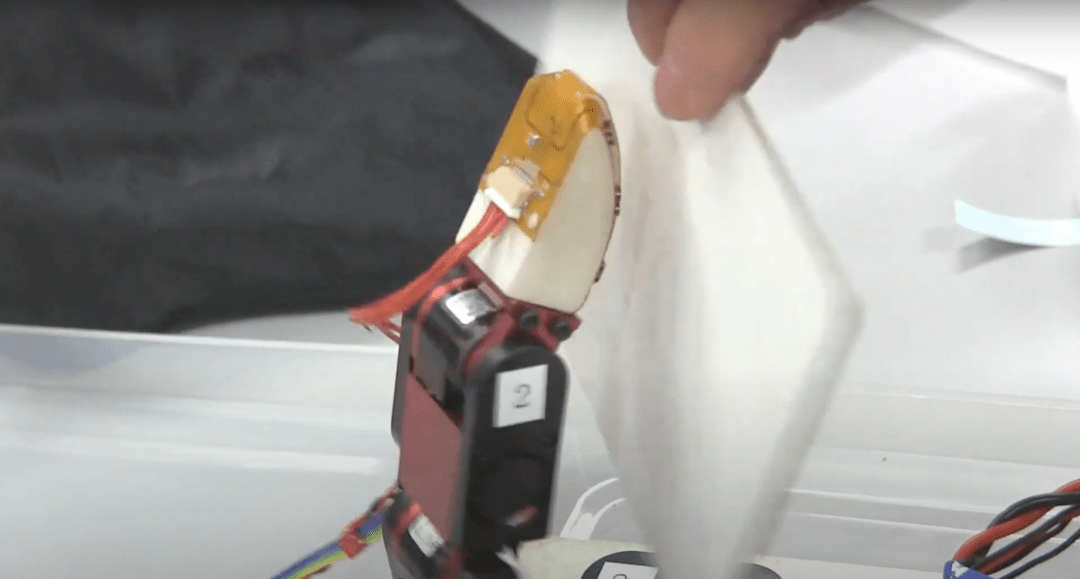
😮 Что это: система предварительного захвата, которая реагирует на предметы с помощью датчика приближения и аналоговых схем.
😯 Как работает: три выхода датчика приближения согласованы с тремя шарнирами и определяют положение между датчиком и поверхностью объекта. Система одновременно управляет положением роботизированного пальца и вектором, который определяет положение захвата в отношении объекта.
За счёт того, что положение и жесты роботизированного пальца контролируются бесконтактно, нет опасности повредить систему или объект.
👉 Посмотреть на это:
👥 Кто: исследователи Осакского университета, Япония.
Источники: kk-hs-sa.website и journals.sagepub.com