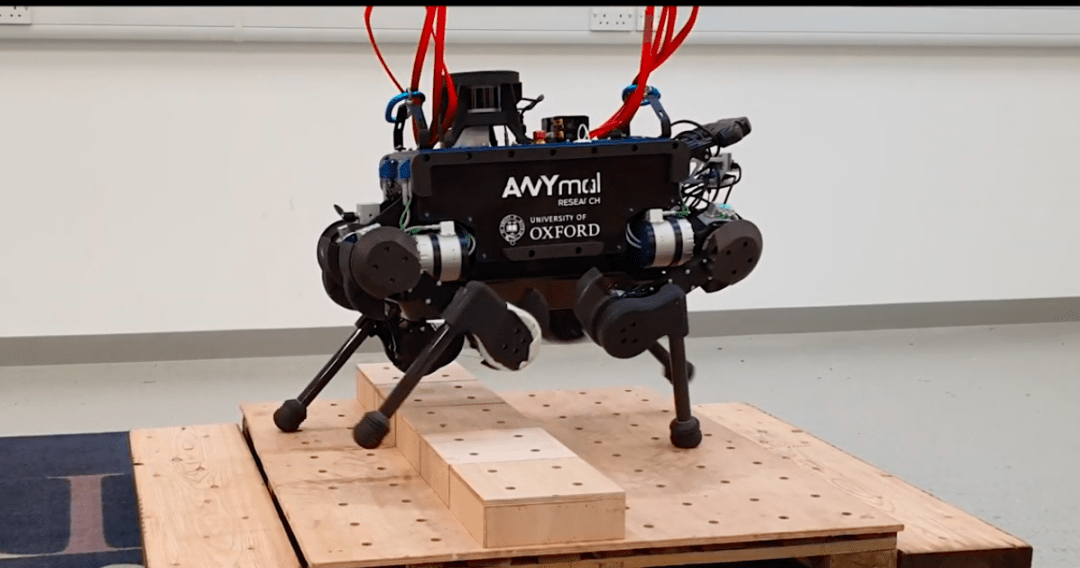

😏 Что: робототехники разработали подход, позволяющий четвероногому роботу делать тыгдык-тыгдык по местности, испещрённой неровностями, кусками кирпича и, возможно, человеческими черепами.
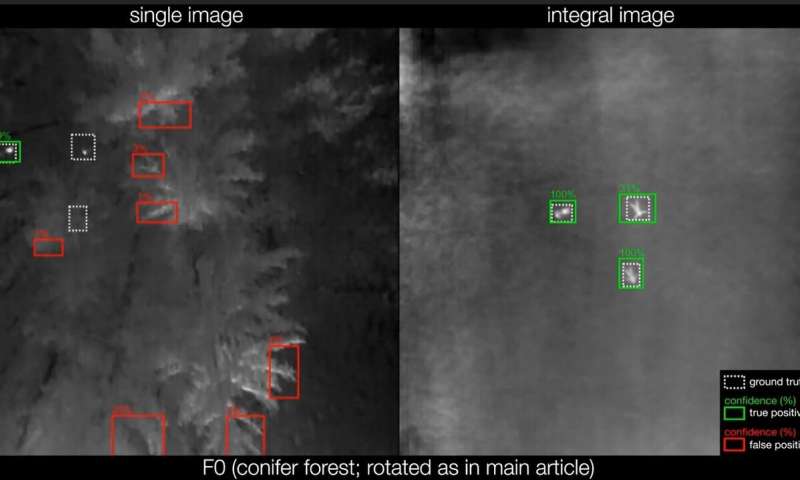
😮 Как работает: у робота есть датчики ландшафта, по которым он строит карту местности. Дальше алгоритм считает, куда ему поставить каждую из лап, а нейронка определяет, как двигать ногами, чтобы тело не слишком колбасило в пространстве. Получается плавное и довольно стабильное движение, например, по изрытому траншеями полю боя.
🤔 Зачем: эти роботы ходят, чтобы новое поколение роботов смогло бегать. Даже по неровностям.
👥 Кто: Oxford Dynamic Robot Systems Group.
👉 Посмотреть:

👉 Подробнее: arxiv.org