
🦾 Проблема: для обучения и управления роботизированными руками нужно специальное оборудование: перчатки, датчики движений или откалиброванные системы из нескольких камер. Это ограничивает многих исследователей и энтузиастов в их изобретениях.
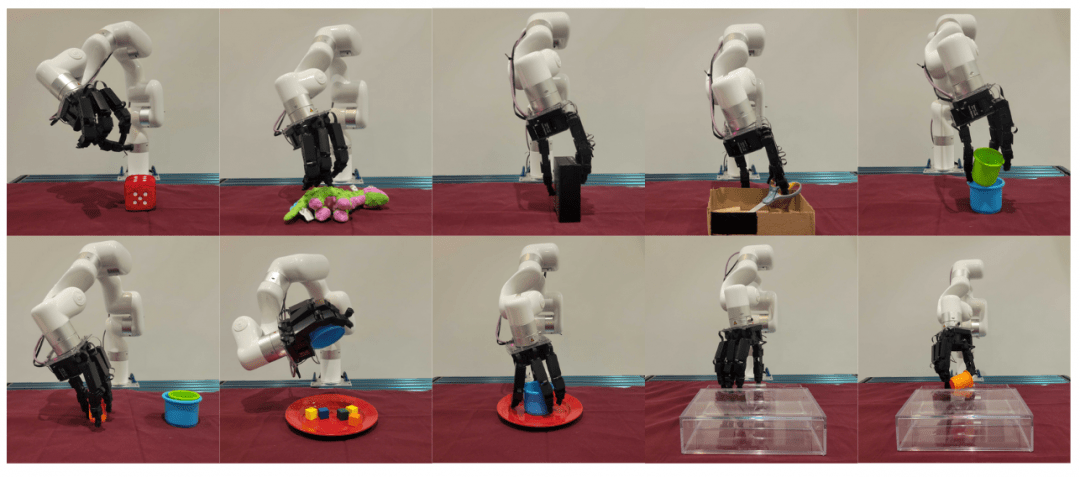
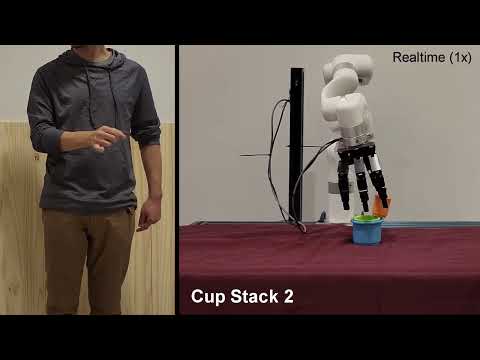
👋 Решение: система, с помощью которой можно дистанционно управлять роботизированной рукой, показывая движения перед обычной камерой.
🤔 Как работает? Система идентифицирует движения человека и соотносит его физиологию со строением роботизированной руки, чтобы робот мог повторить показанное. Модель распознавания обучили на роликах из YouTube, в которых люди взаимодействуют с различными предметами.
🤨 И что? Обучение роботов станет доступнее. Достаточно встать перед камерой и сделать движения рукой. Калибровка камеры не требуется, так что можно стоять где угодно.
👉 Посмотреть:
👉 GitHub: robotic-telekinesis.github.io
👥 Кто: исследователи Университета Карнеги — Меллона, США.
Источники: techxplore.com и arxiv.org