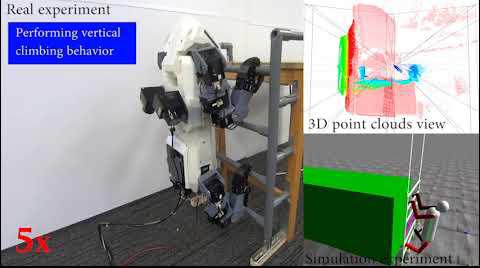

Разработчики установили на машине датчики силы и касания, два лазерных дальномера на спине и четыре камеры на голове. Данные с датчиков объединяются в единое облако, информация поступает алгоритмам— те распознают поручни лестницы и рассчитывают оптимальные точки захвата.
Пока японцы обучают алгоритмы под конкретную лестницу, но это вопрос времени, когда робот сбежит из родительского дома и пойдет завоевывать мир (или в магазин).