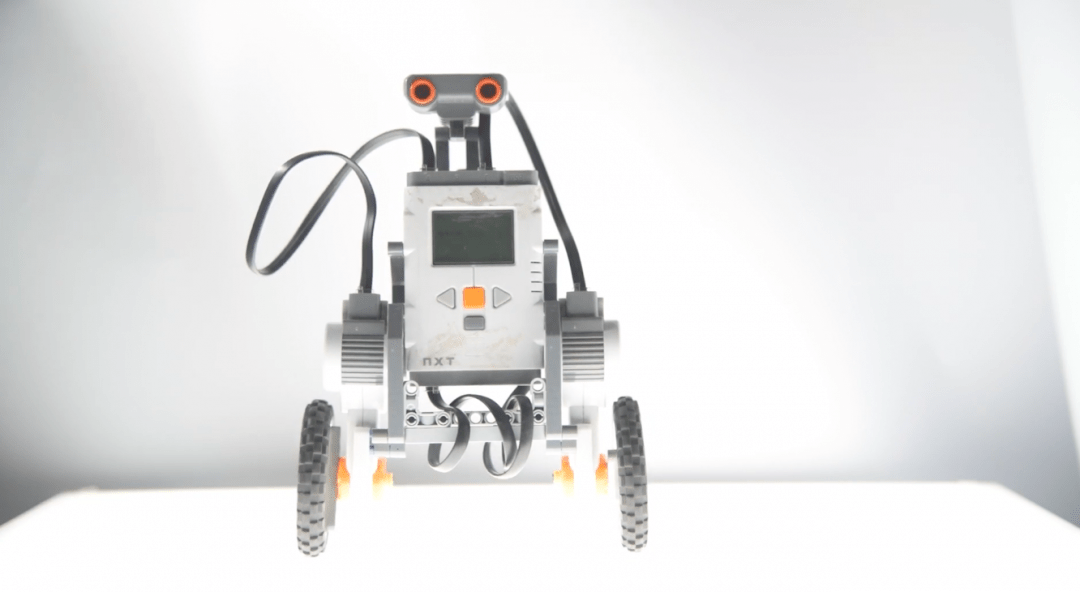
🙂 Придумали: алгоритм, основанный на психологической теории контроля восприятия, которая учит робота балансировать лучше, передвигаться без проблем и хорошо ориентироваться в новых местах.
👥 Кто: учёные Манчестерского университета, Великобритания.
😎 И что: технология работает — с новым алгоритмом робот балансирует намного лучше, чем со старым. Собираются тестировать на роботах с ногами. Такой подход сделает их более устойчивыми и надёжными.
Источник: The University of Manchester