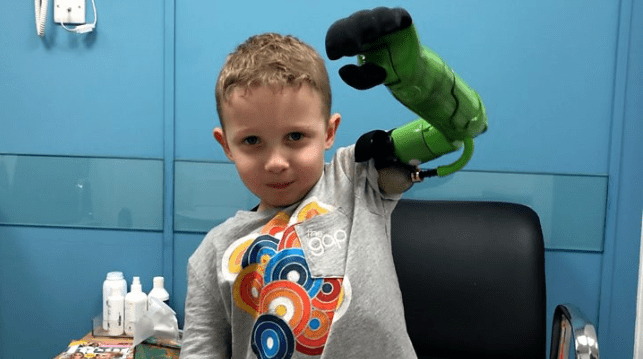
😌 Что: коллаборативные роботы хороши, но, в отличие от их промышленных аналогов, страдают неточностью. Например, несколько одновременно работающих роботов вместе не могут вдеть нитку в игольное ушко. Но инженеры придумали, как решить эту проблему.
😳 Как работает: с помощью лазерного измерения и облака точек. С помощью лазерного измерения определяется относительное положение всех объектов, а с помощью облака точек устанавливаются погрешности, которые не позволяют выполнить задачу. При этом нитку в иголку вдевает один манипулятор, а погрешности правит второй.
😎 Зачем: это повысит точность коллаборативных роботов и расширит их возможности, позволив выполнять сложные задачи.
👥Кто: Исследовательский институт Идиап, Швейцария.
👉 Почитать: arxiv.org
Источник: spectrum.ieee.org





![[Послушайте] Как звучит Вселенная](https://thecode.media/wp-content/uploads/2020/09/photo-1564824726384-9f43d508e71a.jpeg)
![[Почитайте] как разрабатывают 3D-VR-симулятор кровеносной системы человека](https://thecode.media/wp-content/uploads/2020/05/vr-eyes.jpg)