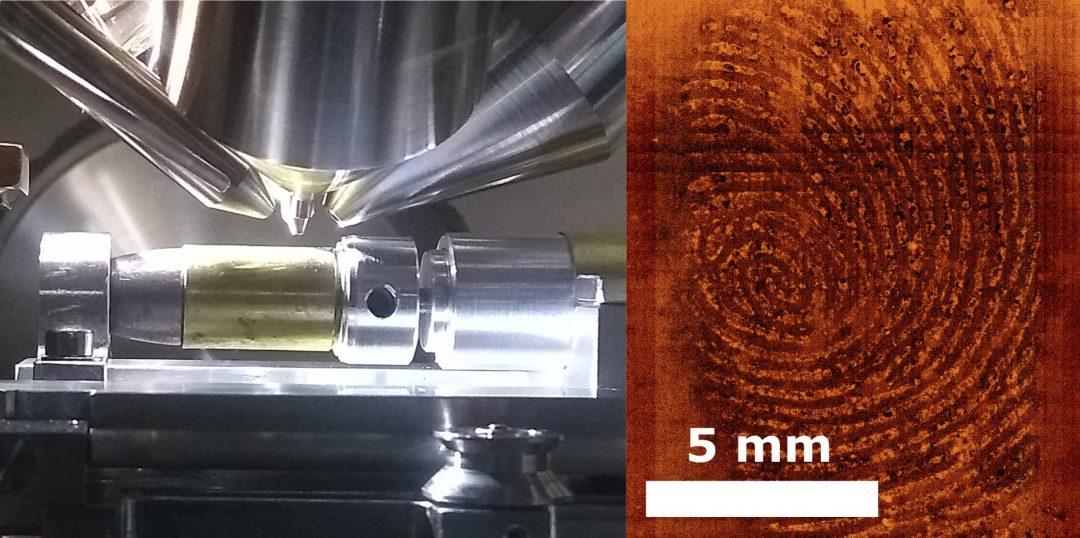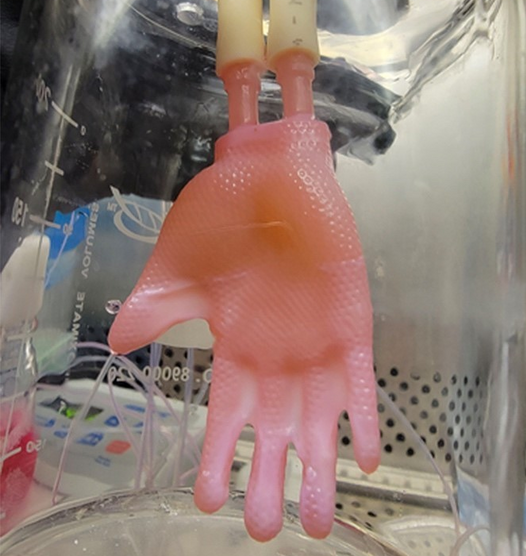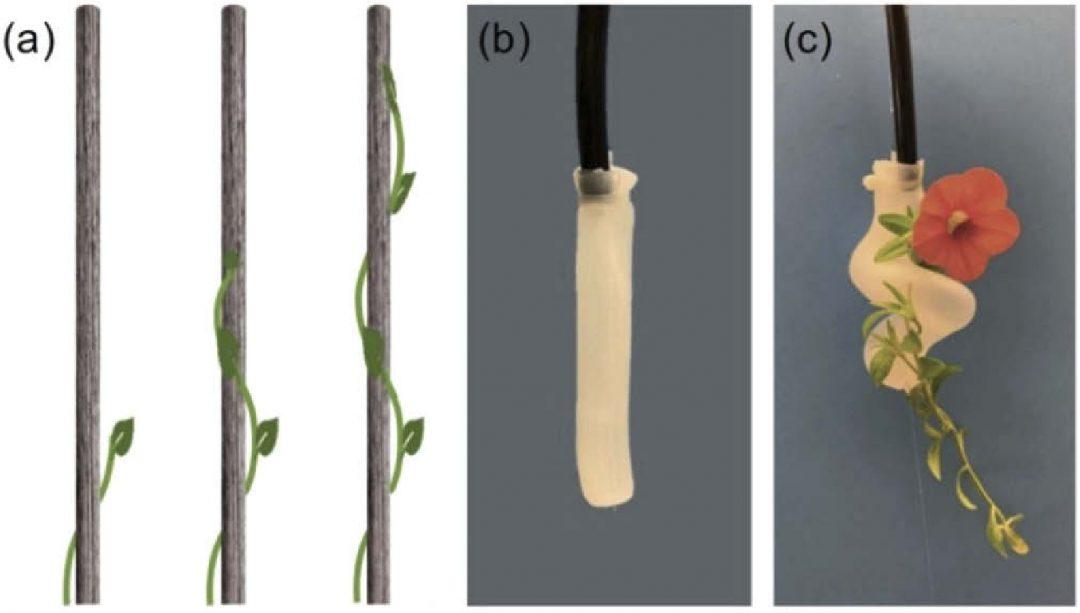

😳 Что: инженеры создали мягкий роботизированный захват, способный работать с очень маленькими предметами.
🤔 Как работает: вдохновлялись растительной лозой и тем, как она легко использует свои чувствительные побеги для взаимодействия с окружающей средой. Чтобы имитировать движение лозы вдоль и вокруг предмета, использовали пневматическое управление. C помощью волоконно-оптической системы роботу обеспечили фидбек в реальном времени.
😮 Зачем: такой захват может брать предметы диаметром меньше 1 мм, поэтому его можно применять в медицине или на производстве.
👥 Кто: Университет Джорджии.
👉 Посмотреть на это: