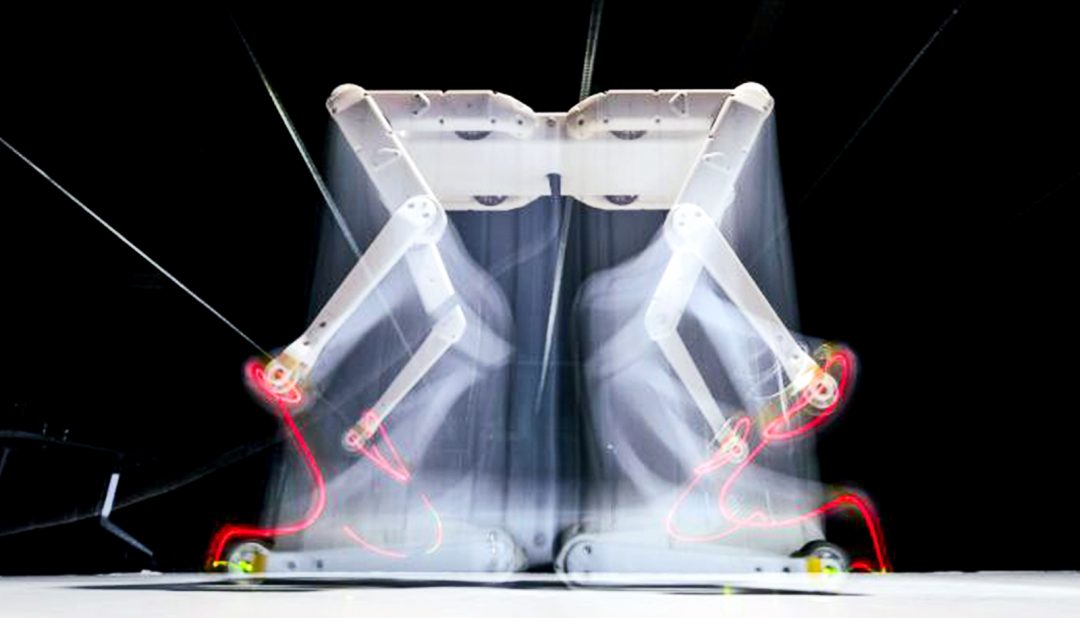

☺️ Что: усовершенствовали навыки прыжков четвероногого робота Solo 8 с открытым исходным кодом.
Solo 8 v2 сохраняет устойчивость на разных поверхностях и при толчках. Для этого использовали обучение с подкреплением.
😁 Зачем: чтобы развивать проект «Открытая инициатива динамических роботов», с помощью которой любой желающий может сделать себе робопса наподобие Спота от Boston Dynamics и КиберДог от Xiaomi. Инициатива помогает делать исследования роботов доступными широкому кругу учреждений и лабораторий.
👉 Посмотреть:

👉 Гитхаб: github.com
👥 Кто: инженеры Института интеллектуальных систем общества Макса Планка, Германия, Нью-Йоркского университета, США.











![[Коротко]: японский суперкомпьютер стал самым быстрым в мире](https://thecode.media/wp-content/uploads/2020/07/004Q7a1OE2OFyQ9WgYAuSBt-1.fit_scale.size_2698x1517.v1592930901-1080x607.jpg)

![[Послушайте] Как звучит Вселенная](https://thecode.media/wp-content/uploads/2020/09/photo-1564824726384-9f43d508e71a.jpeg)
![[Посмотрите] 50-летний плёночный фотоаппарат превратили в цифровой](https://thecode.media/wp-content/uploads/2021/08/custom-cartridge-film-canister-2-800x450-1.jpg)