😢 Проблема: трёхмерное зрение роботов и беспилотных автомобилей сильно зависит от того, могут ли камеры охватить объекты, которые спрятаны за другими. Приходится использовать сложные системы, которые сканируют пространство лазерами и достраивают картинку по отражениям сигналов. Эти процессы требуют много времени и больших мощностей.
😎 Решение: CLIP — компактная система 3D-камер, которые видят пространство по аналогии с многоракурсным зрением мух и определяют положение объектов с помощью эхолокации, как у летучих мышей.
🤔 Как работает? Летучие мыши ориентируются в темноте, издавая высокочастотный писк и распознавая предметы по отражению звуков. Мухи хорошо видят пространство вокруг себя за счёт строения глаз: они воспринимают фрагменты окружения под разными углами.
Система камер объединяет эти свойства. Дополнительный лидар измеряет расстояние до объектов и создаёт 3D-карту местности.
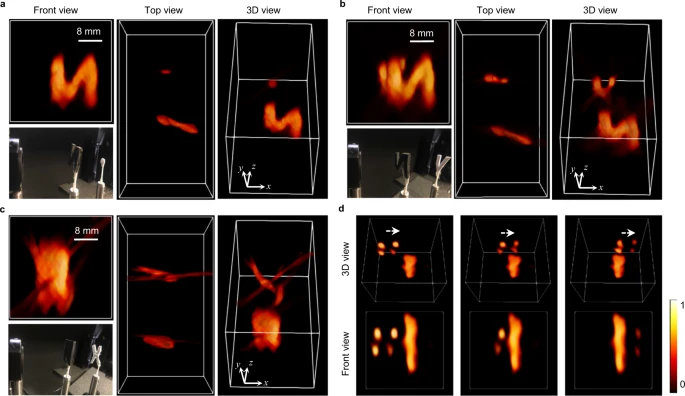
Семь камер с CLIP и лидаром делают снимок с низким разрешением. Система обрабатывает изображения с отдельных камер, объединяет фрагменты и воссоздаёт единую трёхмерную картинку с высоким разрешением.
👉 Посмотреть:
👥 Кто: исследователи Калифорнийского университета в Лос-Анджелесе, США.
Источники: sciencedaily.com и nature.com