😢 Проблема: бионические конечности и гуманоидных роботов всё чаще делают из мягких материалов, которые не способны собирать широкий спектр сенсорной информации.
😎 Решение: техника тактильного восприятия на основе проприоцепции — ощущения положения тела и нагрузки на суставы и сухожилия. С его помощью человек с закрытыми глазами чувствует, например, положение своей руки и тяжесть предмета в ней.
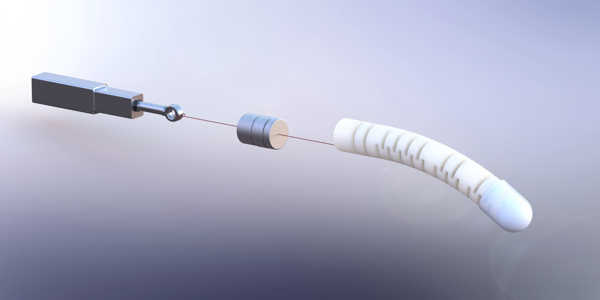
Для испытаний сделали робопалец из линейного привода и сухожилия с датчиком напряжения. Когда привод сгибает или выпрямляет палец, нагрузка на сухожилие меняется. Данные о деформации характеризуют объект, которого коснулся робопалец. По ним нейронка определила текстуру и жёсткость объекта с точностью до 100%.
Датчик напряжения находится в середине сухожилия вместо кончика пальца, чтобы идеальный или точный контакт с объектом не требовался.
👥 Кто: исследователи Бэйханского университета, Китай, Колорадского колледжа, США.
Источники: techxplore.com и arxiv.org





![[Глядите] GRID Compass — ноутбук НАСА, который летал в космос](https://thecode.media/wp-content/uploads/2020/06/MzYzMjg3MQ-960x720.jpeg)
![[Посмотрите] Гугл адаптировал видеоконференции для глухих людей](https://thecode.media/wp-content/uploads/2020/10/sign-language-video-chat-1080x540.jpeg)
![[Почитайте] как работают алгоритмы-менеджеры в китайских корпорациях](https://thecode.media/wp-content/uploads/2021/02/775.jpg)