🤖 Проблема: обучать роботов можно разными способами. Например, управлять им вручную столько раз, пока робот не научится нужным действиям. Способ посложнее — обучение с подкреплением, когда систему тренируют на миллионах примеров, а затем адаптируют усвоенные навыки к задачам реального мира. Но оба способа подходят для обучения одной задаче, их сложно масштабировать и адаптировать к реальности, например к домашним делам.
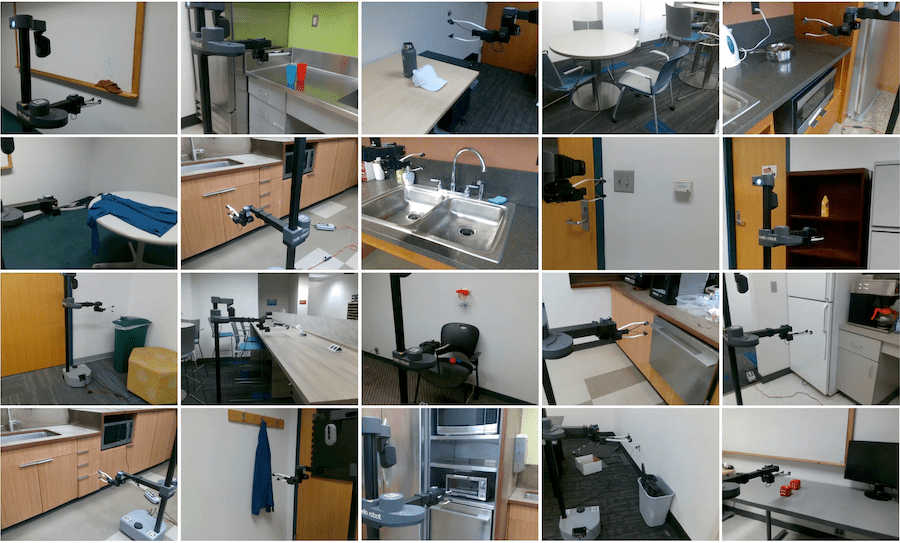
😎 Решение: обучать роботов через имитацию действий человека в естественной среде с помощью алгоритма WHIRL (Wild Human-Imitated Robot Learning).
Робот наблюдает за человеком и повторяет его действия. В ходе эксперимента робот научился выполнять более 20 бытовых задач, например открывать дверцы, накрывать кастрюлю крышкой, доставать мешок с мусором из ведра.
🤨 И что? Люди выполняют различные домашние дела, поэтому удобнее будет обучать роботов сразу в реальных условиях, а не программировать каждую задачу традиционными способами.
👉 Посмотреть:
👥 Кто: исследователи Университета Карнеги — Меллона, США.
Источники: sciencedaily.com и scs.cmu.edu